
By Eko Prasetiawan, Chief Hydraulics Engineer, JLG Industries Inc.
 Telescopic handler (telehandler) operators have been searching for a solution that would give precise boom control when paired with a boom suspension (ride control) system. Traditional load hold valves have limitations due to high pilot pressure requirements and techniques used to improve stability—such as pilot damping schemes—that interfere with precise control for machines equipped with a ride control accumulator.
Telescopic handler (telehandler) operators have been searching for a solution that would give precise boom control when paired with a boom suspension (ride control) system. Traditional load hold valves have limitations due to high pilot pressure requirements and techniques used to improve stability—such as pilot damping schemes—that interfere with precise control for machines equipped with a ride control accumulator.
A few of the challenges encountered with previous technologies include:
• Delayed or aggressive initiation of a lift down function after a lift up function
• Aggressive initiation behavior of the lift up function after lift down function is selected
• Imprecise stopping when lowering the cylinder
To address these challenges, a system is required that gives operators the precision they desire. With recent changes in valve technology, engineers have discovered breakthrough performance in hydraulic circuitry through gravity lowering that improves the operator’s control of a telehandler boom and the overall efficiency of the hydraulic system on both ride control and non-ride control equipped telehandlers.
 What is gravity lowering?
What is gravity lowering?
With the demand for machines to be more productive and energy efficient, gravity lowering allows for increased speeds and precise movements. Similar technology has previously been seen on aerial work platforms, specifically boom lifts, but is beginning to make its appearance on telehandlers with a new feature to enhance lift down capability.
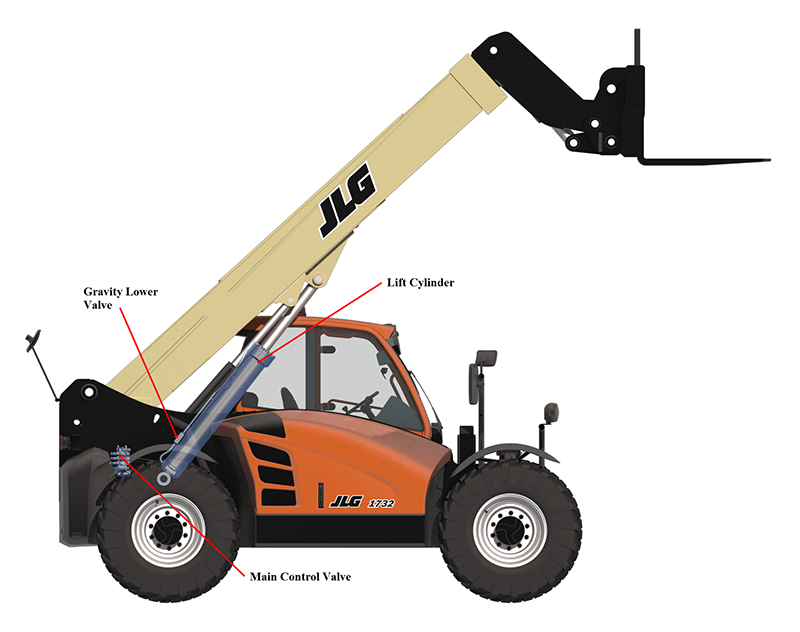
A gravity lowering circuit is applied on the lift cylinder of a telehandler and works in harmony with the main control valve (MCV). In the circuitry, shown in Figure 1, valve (1) is the holding device that opens with a proportional control signal applied to port “Pil” and fed from the MCV control pressure chamber. The relationship between the opening of valve (1) and the shifting of the MCV spool are carefully designed to provide the required flow and back pressure for smooth control. Similarly, valve (3) is sequenced to open with the pilot signal at “Pil” and permit oil recovery—that is, exhaust oil from the bore side of the cylinder can cross over and refill the rod side. In this manner, the MCV spool and pump are partially alleviated from providing flow to the lift cylinder’s rod side and therefore flow is available to perform other hydraulic functions. Valve (4) is provided such that if during a lowering function there is insufficient pressure in the bore for lowering by gravity, as in back dragging bucket work, the recovery circuit is shut off and the flow delivery from the pump and MCV spool to the rod side immediately begin to pressurize the rod side to provide down force at a reduced rate of speed. Finally, valve (2) is a relief valve that serves as a circuit over pressure protection.
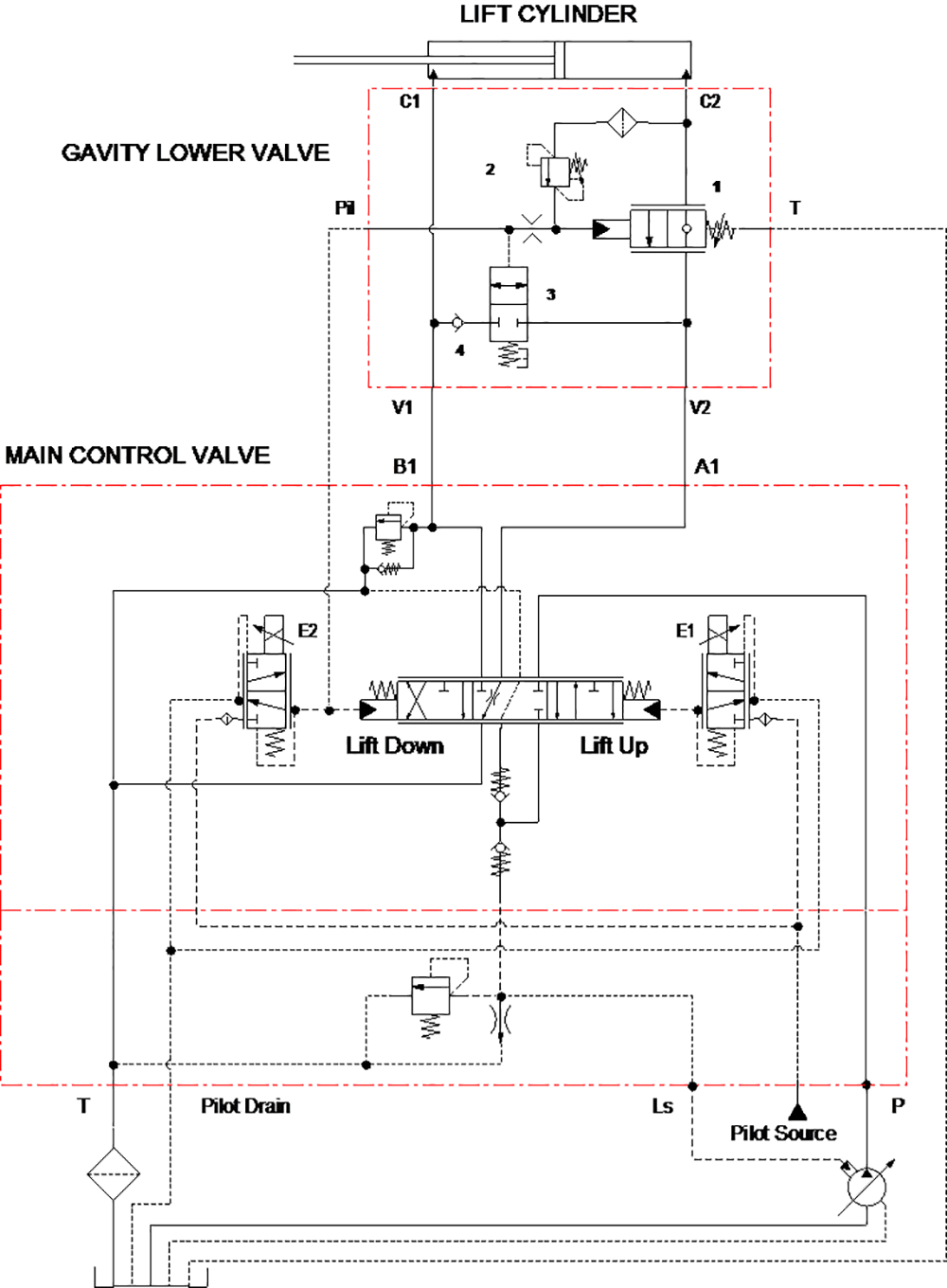 Because the pilot pressure for opening valve (1) is aligned with the MCV spool shifting pressure, the pressure required is low and provided from a stable source, unaffected by vehicle dynamics or load sense oscillations. Gravity, pressing down on the lift cylinder piston bore, provides the energy to exhaust oil from the cylinder and the rod side and is no longer required to have high pressure to perform lift down. In this way, the potential to trap pressure in the rod side, and in turn over-compress the bore side due to pressure balance about the cylinder piston is eliminated. The challenges with aggressive initiation and imprecise boom control on ceasing motion are eliminated at the source; not storing excess energy in the rod or bore side of the cylinder keeps the cylinder in perfect force balance, and during command transitions there is no excess energy to rebalance forces quickly or to manage carefully with damping schemes. This results in the initiation and termination of functions quite precisely.
Because the pilot pressure for opening valve (1) is aligned with the MCV spool shifting pressure, the pressure required is low and provided from a stable source, unaffected by vehicle dynamics or load sense oscillations. Gravity, pressing down on the lift cylinder piston bore, provides the energy to exhaust oil from the cylinder and the rod side and is no longer required to have high pressure to perform lift down. In this way, the potential to trap pressure in the rod side, and in turn over-compress the bore side due to pressure balance about the cylinder piston is eliminated. The challenges with aggressive initiation and imprecise boom control on ceasing motion are eliminated at the source; not storing excess energy in the rod or bore side of the cylinder keeps the cylinder in perfect force balance, and during command transitions there is no excess energy to rebalance forces quickly or to manage carefully with damping schemes. This results in the initiation and termination of functions quite precisely.
Benefits
By introducing gravity lowering to telehandlers, the system offers many advantages to both the hydraulic system designer and the machine operator. There are three major benefits that are easy to see, but more will come to light as the technology increases in application.
The first of those benefits is energy savings. In a traditional holding valve, a parasitic load is created in the cylinder function due to the high pilot pressure requirement for opening. This results from a setting for the main element that is usually 25-30% above the maximum potential load. While the traditional load-holding valves come with a pilot ratio, which reduces the amount of energy consumed during lowering, a significant energy loss remains for the majority of load cases. This energy will then become a direct heat load and it must be removed by the system cooling circuit.
Another benefit is increased speed. Powered flow from the system pump is not required to lower the boom with gravity lowering, which allows for the power to be directed to other functions. The speed of combined function movements is greatly increased.
Gravity lowering also gives the operator increased precision, which assists increased cycle time. As mentioned earlier, the gravity lowering valve is not developed from the pressure in the rod side of the cylinder. Instead, it is taken directly from the operator control input, giving the operator more control. The machine system and machine control system now have unlimited opportunity to determine how much and how fast the pilot pressure to the gravity lowering valve is developed in relation to the operator input request.
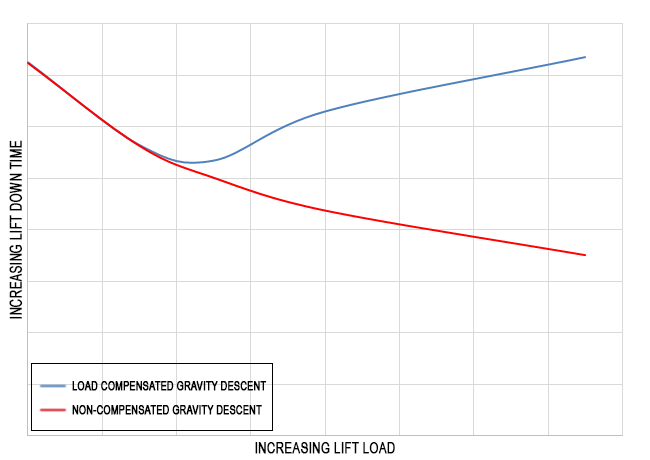 In addition to increased precision, some manufacturers include a valve that self-compensates for changes in load, which allows for the velocity of the boom down function to stay controlled no matter what the load is. This compensation works by trying to make a standard lift down time. As shown in Figure 2, as the lift load increases in weight, lift down time begins to pick up speed but can even itself out as the load continues to increase.
In addition to increased precision, some manufacturers include a valve that self-compensates for changes in load, which allows for the velocity of the boom down function to stay controlled no matter what the load is. This compensation works by trying to make a standard lift down time. As shown in Figure 2, as the lift load increases in weight, lift down time begins to pick up speed but can even itself out as the load continues to increase.
Other benefits include a reduction in noise level and increased operator comfort. Due to no power being demanded from the system to lower the boom at high speeds, operators can achieve the same (or faster) cycles at lower engine speeds, which allows for reduced noise and fuel consumption. When one considers lower noise levels, faster movements, and increased precision contributing to the machine operator achieving the same work with less effort, the machine becomes easier to operate and provides more operator comfort.
Conclusion
This past March, at CONEXPO 2017, JLG Industries revealed to attendees a glimpse at the future of their telehandler line. The 742 telehandler, which offers a 7,000-lb maximum lift capacity, also introduced the precision gravity lowering system to the family. With the system’s incorporation, the telehandler can rely on hydraulic power to raise the boom and gravity to lower it, thus providing the operator with more precise control as well as increasing the machine’s efficiency. JLG plans to incorporate the gravity lowering technology across its entire line of telehandlers later this year.
Ultimately, gravity lowering removes inefficiency from the hydraulic system. Productivity will greatly increase due to the benefits gravity lowering provides the system and operators can feel more confident in landing loads at height.
JLG Industries Inc.
www.jlg.com