
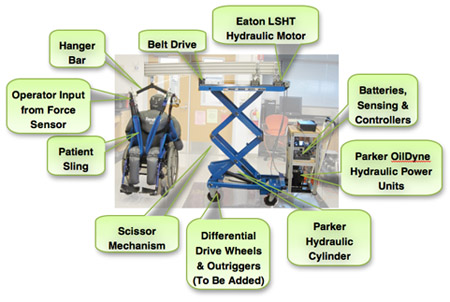
One goal of the National Science Foundation’s Engineering Research Center on Compact and Efficient Fluid Power (CCEFP) is to explore how advanced fluid power technology can be used in a wider range of applications. A significant market need has been identified for an improved mobile device for transferring mobility limited people—particularly bariatric patients. Typical transfers include moving from a bed to a wheelchair, from the floor into a wheelchair, or from a wheelchair into a shower chair. Hydraulic actuation has the advantage of providing large force capability in a compact package, with the power source located at the base of the device. (Traditional lift devices, including this prototype, support the patient in a sling suspended from a hanger bar.)
• A needs assessment indicated that several needed improvements over current market patient lifts.
The device needs a larger range of motion and better ability to maneuver around obstacles in a typical home or clinical environment.
• The required physical and mental workloads of the caretaker need to be reduced, and it should be operable by a single caregiver.
• The device must have the force capability in any kinematic configuration to maneuver up to 1000 lbs.
• This application requires a powerful device operating inside a home, with both the caregiver and patient in its workspace. The control must be smooth, stable, and safe.
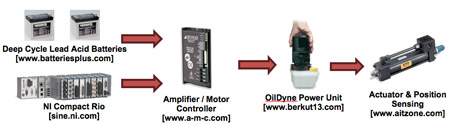
A new prototype mobile patient transfer device is being developed that is actuated by a form of pump-controlled hydraulic system. It has vertical and horizontal actuated degrees of freedom in the lifting arm, and powered differential drive wheels will be added. The actuation uses a separate Parker OilDyne hydraulic power unit for each degree of freedom, which includes a reversible electric DC motor, a bidirectional gear pump, and a reservoir.
Onboard electric power is provided by two 12V deep cycle lead acid batteries in series. The sensor data acquisition, processing and control algorithms are implemented using a National Instruments Compact Rio. The NI cRio provides a control signal to an Advanced Motion Controls servo drive for the electric motor. The hydraulic pump drives either a low-speed high-torque hydraulic motor or a hydraulic cylinder. While the current prototype is bulkier than desired, this is only for providing modularity and simplicity in the prototype design; it could easily be optimized to fit in a much more compact package.
One unique aspect of the operator interface for this device is that the caretaker interacts directly with the patient, fine-tuning position and orientation, placing limbs, etc., while simultaneously controlling the lift device. One option for the operator input is a multi-axis force/torque sensor mounted at the hanger bar. Coordinated control allows the operator to intuitively manage multiple degrees of freedom with one input device.

Several different control algorithms are being tested. Preliminary tests on an earlier prototype have been performed using a passivity-based human power amplifier control algorithm. Control algorithms to be tested will include features to prevent motions that may risk tipping, manage kinematic redundancy between the base and lifting arm, manage environment interaction forces, and compensate for patient swinging. The goal of the algorithms is to provide a simple, intuitive control strategy to allow the caretaker to focus on the patient. The researchers would like to acknowledge National Instruments, Parker Hannifin, Eaton and Advanced Motion Controls, as well as the many other CCEFP sponsors, for their support.
Contributed by Ms. Heather Humphreys, PhD candidate (Advisor: Professor Wayne Book, Georgia Institute of Technology)